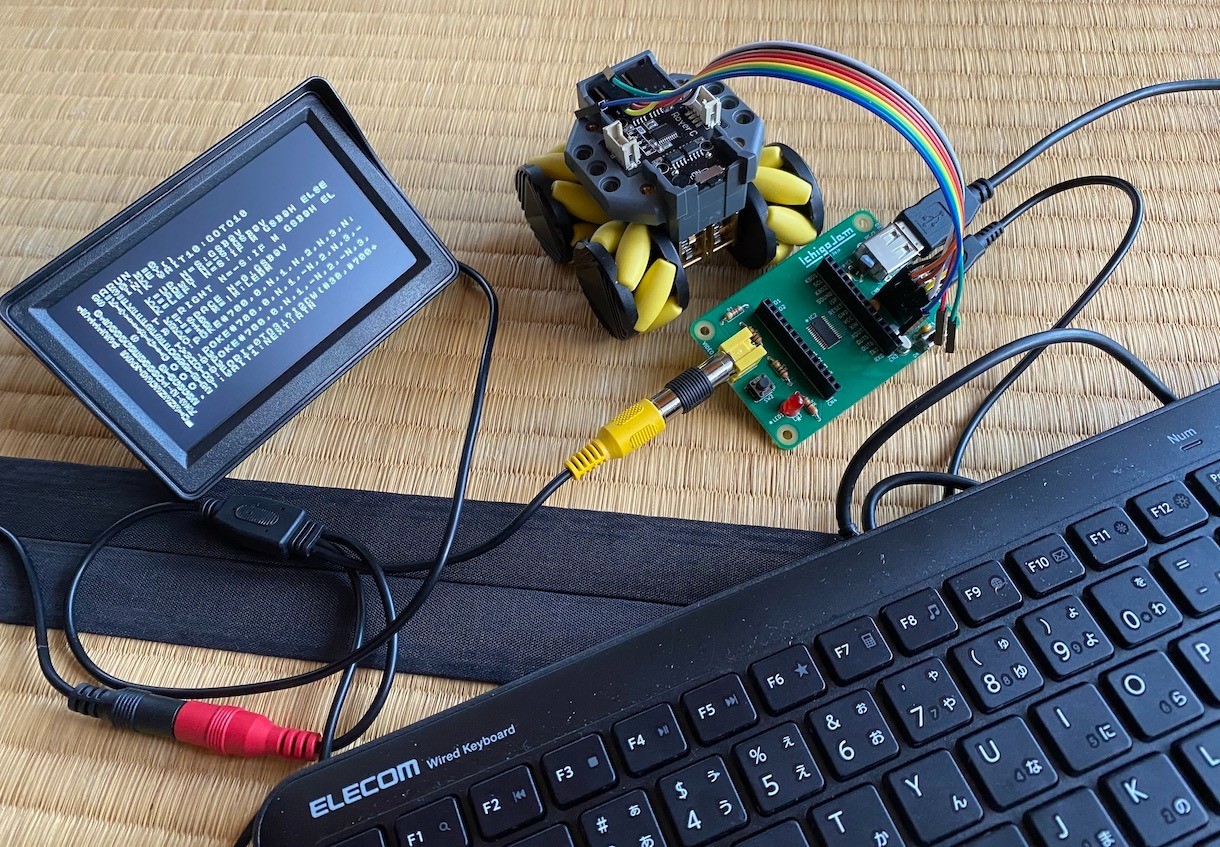
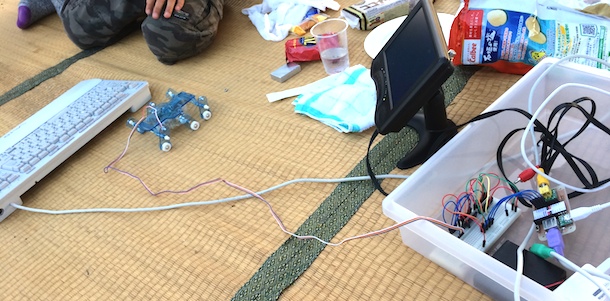
多様なキノコを相互接続するフィラメント (菌糸) の地下ネットワークである菌糸体は、 菌類の電気生理学的活動を2 つの機械装置 (可鍛性の 5 肢ロボットと 4 輪自律走行車) の運動エネルギーに変換するために初めて使用されました。無線。

最近サイエンス・ロボティクス誌に掲載された研究によると、米国のコーネル大学とイタリアのフィレンツェ大学の学際的な研究者チームが、エリンギのおいしい培養物( Pleurotus eryngii )をテストした。バイオハイブリッドロボットの動作において、菌糸体の電気的特性の信号を利用します。
コーネル大学のプロジェクトリーダー、ロブ・シェパード氏はプレスリリースで、「ロボットの電子機器上で菌糸体を成長させることで、バイオハイブリッドマシンが環境を感知して反応できるようにすることができた」と説明した。
生物学とテクノロジーの融合
生物学的コンポーネントと機械の融合は、進化によって何百万年もの間この種の統合が洗練されてきたため、まったく新しいアイデアではありません。そのため、真菌菌糸体の分岐し相互接続されたネットワークは、人間の脳のニューロンやシナプスのネットワークと同様に機能します。

この意味で、キノコもその一部である菌類界で採用されている生物学的メカニズムを研究し再現することは、サイバネティック技術の開発のための多くの「近道」とより効率的な道を明らかにする可能性があります。
これらの菌類は管理が簡単なので培養も容易で、光合成をしないため、他の生物にとっては困難な条件下でも生存できます。相互接続された細いワイヤーの地下ネットワークは、環境に敏感で反応し、変化に適応する一種の「知性」を明らかにします。

キノコで動くロボットは何に役立ちますか?

この研究で構築された2台のロボットは、菌糸体の細胞外電気生理学によって生成され、外部刺激(この場合は紫外線)によって生成される電気活動のスパイクによって電力を供給されるマイクロコントローラーユニットによって操作されます。小型コンピューターによって媒介されるエネルギー生成により、モバイル デバイスの機械的応答が交互に行われます。
この記事の最初の著者であるアナンド・ミシュラにとって、このプロジェクトは単にロボットを制御することだけではありません。 「 それは、生命システムとの真のつながりを生み出すことでもあります。なぜなら、一度信号を聞くと、何が起こっているのかも理解できるからです。おそらく、その信号は、ある種のストレスから来ているのです。つまり、物理的な反応が見られることになります。なぜなら、私たちは視覚化できないからです。」これらの信号は送信されますが、ロボットは視覚化を実行しています」とバイオロボット学者は言います。
「ロボメロ」は少し粗雑に見えるかもしれませんが、そのシステムの将来のより洗練されたバージョンは、農業、環境監視、ヘルスケアなどの分野で応用できる可能性があります。これらのシステムは、たとえば、特定の土壌が必要とする栄養素や殺虫剤の正確な量、または増加した汚染物質に対する反応を評価できます。